
Your production agent just deleted a customer database. Not because the model failed. Not because the prompt was wrong. Because your agent cannot simulate what happens after it takes action. It sees the current state, calls the LLM, and commits. Every decision is made in a vacuum of future context. That is not planning. That is reaction with extra steps.
Here is the failure mode in plain terms. A typical agent stack receives input, reasons about the present, selects a tool, executes, and loops. At no point does it ask: "If I run this SQL migration, what breaks downstream?" It does not simulate the permission escalation cascade. It does not model the dependency graph. It reacts to the last observation and hopes the next step works out. This is the single biggest architectural gap in production agent systems today, and almost nobody building at scale is addressing it at the framework level.
The research community just did. Four papers published on June 30, 2026, converge on the same idea: agents need world models.
What World Models Actually Are
A world model is an agent's internal simulator. It lets the agent predict the consequences of actions before taking them. Think of it as the difference between a chess player who sees the current board and one who runs five moves forward in their head. Current state-of-the-art agent stacks are essentially stateless chatbots with tools. World models make them stateful planners with internal simulation.
This matters now for three reasons. First, research convergence: those four June 30 papers arrived independently and point in the same direction. Second, enterprise demand: teams are hitting the limits of reactive agents in production. Third, hardware maturity: inference cost is dropping fast enough that running an internal simulation loop is becoming economically viable.
Three Architectures for AI World Models
There are three ways to build world models into agents, and understanding the tradeoffs is critical.
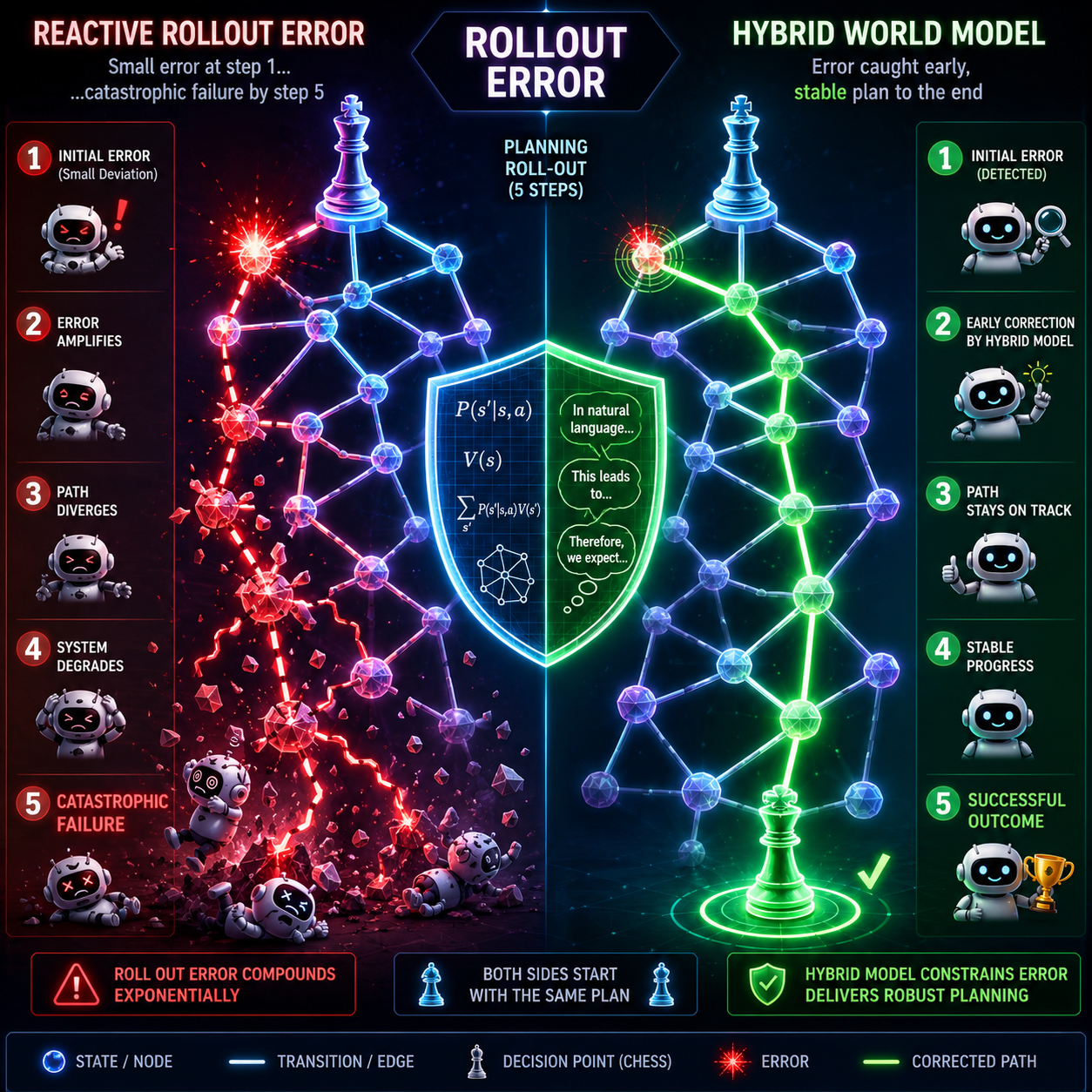
Agent-based world models use the LLM itself as the simulator. The agent calls the model to predict what happens next. This is flexible. It handles novel situations without explicit programming. But it is error-prone. When an LLM plans in language alone, errors compound across steps. A small hallucination in step one becomes a completely wrong trajectory by step five.
Parameterized world models ground simulation in structured data. They learn dynamics from observed state transitions and predict next states mathematically. This is accurate but rigid. It works beautifully in environments where the rules are fixed and the state space is bounded. It fails when the agent encounters something outside its training distribution.
The emerging standard is hybrid. "Grounded Iterative Language Planning," from arXiv 2606.27806, proposes combining both. Use the parameterized model to ground predictions in real data, then use the LLM to reason about those predictions in language. The parameterized component catches hallucinations before they propagate. The LLM component handles edge cases the structured model never saw. This is the most practical architecture for production systems today.
Why Rollout Error Is the Silent Killer
The most sobering paper of the four is arXiv 2606.27780, "Understanding Rollout Error in Graph World Models." It proves something every builder suspects but few quantify: small errors do not stay small in multi-step plans.
In graph-structured environments, where states are nodes and actions are edges, a prediction error on step one cascades through the graph. The paper provides theoretical bounds on this rollout error and identifies failure modes where tiny initial deviations produce completely invalid planning trajectories. The practical implication is brutal. Your agent might achieve 95% accuracy on the first planning step, but by step five that accuracy can drop to roughly 60%. You do not notice this in a demo. You notice it when the agent has been running autonomously for twenty minutes and has built a plan on top of a plan on top of a corrupted assumption.
This is not a model quality problem. It is an architecture problem. You cannot fix rollout error by using a bigger LLM. You fix it by changing how the agent plans.
What Enterprise Confidence Data Tells Us
MIT Technology Review published a survey on June 29, 2026, titled "Agent Confidence on the Technical Frontier," sponsored by Microsoft. The survey asked 300 global technology experts to rank confidence in autonomous agents across 101 tasks. The results are instructive.
Confidence surges for measurable tasks: generating reports, producing boilerplate code, monitoring data quality. It drops significantly where complex reasoning and business context are required. Data workflows emerged as the breakthrough domain where teams actually trust agents to act without human oversight. But the report notes that readiness drops largely because business context is not being supplied to agentic systems.
Here is where the survey data connects directly to world models. Teams do not need a bigger model. They need a planning architecture that can ingest business context, simulate outcomes against that context, and only then take action. That is exactly what world models provide. The survey data suggests that trust follows predictability, and predictability requires simulation. Without a world model, an agent cannot simulate how a decision plays out against real business constraints. It is flying blind, and the confidence data proves that teams know it.
What This Means for Your Stack
If you are running agents in production today, you should be asking three questions about your architecture.
First, can your agent predict the consequence of an action before executing it? Not rhetorically. Actually. Does your framework have a simulation step, or does it map observation directly to action?
Second, how does error propagate across planning steps? If step three of a ten-step plan is wrong, does the agent detect the divergence, or does it keep building on the error?
Third, for long-horizon tasks, does your agent maintain an internal state of the world, or does it re-derive context from scratch on every loop?
If the answers are no, unknown, and re-derive, you are running a reactive system. That is fine for short tasks with low stakes. It is not fine for autonomous agents that operate across minutes, hours, or days.
Start experimenting with world models now for long-horizon tasks. The bridge from today's reactive agents to tomorrow's proactive ones is not a model upgrade. It is an architectural layer. And that layer is arriving in the research literature exactly when production systems are hitting the ceiling of reactivity.
The next bottleneck in agent deployment is not inference cost. It is not context length. It is whether your agent can simulate what happens after it acts. The builders who solve that first will be the ones whose agents do not delete databases. The ones who do not will keep finding out the hard way.
Get More Articles Like This
Getting your AI agent setup right is just the start. I'm documenting every mistake, fix, and lesson learned as I build PhantomByte.
Subscribe to receive updates when we publish new content. No spam, just real lessons from the trenches.